I recently saw someone ask online: “Can I just use a circuit breaker to run a motor?” The question caught my attention because it sounds simple, but the reality behind it isn’t.
Technically, yes—the motor will run. But practically and legally, it’s a bad idea. Electrical codes, like the National Electrical Code (NEC), require proper protection for motors, not just short-circuit protection.
A standard breaker can stop a short circuit, but it doesn’t protect the motor from overloads. That means the motor can still overheat, get damaged, or cause unexpected trips.
These rules exist for good reasons. They are based on real-world experience showing what happens when motors aren’t properly protected. Following them keeps motors safe, avoids unnecessary damage, and makes sure everything meets legal requirements.
Understanding Motor Starting Characteristics
When I first started learning motors, I assumed they behaved like any other piece of equipment. You just need to flip the switch, and they run at their normal operating current. Pretty simple, right? Not quite.
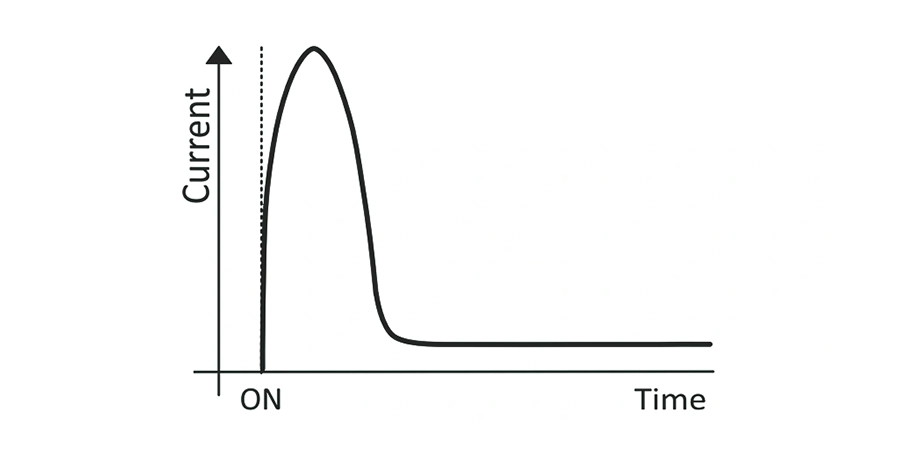
Motors have a personality all their own, especially during startup. When an electric motor first energizes, it doesn’t gradually ease into operation—it demands a huge surge of current that can take you by surprise if you’re not ready for it. This surge, known as inrush current or locked rotor current, is completely normal but can cause serious trouble on equipment that isn’t built to handle it.
The Startup Surge
Think of a motor at startup like a car stuck in mud. It needs far more power to break free and get moving than it does to maintain speed once it’s rolling. In those first few seconds, a motor typically draws anywhere from 5 to 8 times its full load current (FLC). In some cases, particularly with high-efficiency motors, that surge can exceed 18 times the FLC.
This isn’t a fault or a problem—it’s physics. The motor’s rotor is sitting still, which means the circuit impedance is extremely low. All that energy is needed to overcome inertia and accelerate the motor to its operating speed. Once the motor gets there, typically within a few seconds, the current drops back down to normal running levels.
The Asymmetry Problem
Here’s where it gets interesting. The inrush current isn’t always symmetrical across all three phases. Depending on exactly when the motor energizes relative to the AC voltage cycle, the inrush current on one phase can spike to double the symmetrical locked rotor current value. This can be misleading because the uneven surge may look like a motor problem, but it’s simply a normal effect of how AC power and motor physics work.
Why Starting Time Matters?
Most motor protection devices are designed to handle high starting currents for up to 10 seconds. But what happens when the motor takes longer to get up to speed? Heavy loads like conveyor belts, large compressors, or pumps with significant inertia can take 15, 20, or even 30 seconds to reach full speed. During this entire time, the motor is drawing well above its rated current.
Standard circuit breakers interpret this extended high-current period as a fault condition. The thermal element inside heats up, and eventually trips the breaker—even though the motor is doing exactly what it’s supposed to. This is what we call "nuisance tripping," and it’s one of the primary reasons circuit breakers fail when used for motor control.
Why Circuit Breakers Trip During Motor Startup?
Circuit breakers often trip during motor startup because they simply aren’t designed to handle the high inrush currents that motors naturally draw. What looks like a fault is usually just a mismatch between how circuit breakers work and what motors need in those first few seconds.
The Thermal Element’s Fatal Flaw
Inside a thermal-magnetic circuit breaker, there’s a bimetallic strip that bends when heated by current flowing through it. This is the thermal protection component. It’s designed to trip the breaker when sustained overcurrent conditions occur—like when you plug too many space heaters into one circuit.
The issue is simple: the bimetallic strip can’t tell the difference between "sustained overcurrent from a fault" and "temporary high current from normal motor starting." When that 6-times-normal startup current flows through, the strip heats rapidly. If the motor takes a bit too long to accelerate, or if the timing happens to be unlucky, the strip bends far enough to trigger the trip mechanism.
The Sizing Dilemma
To avoid nuisance tripping, you might think: "Just use a bigger breaker!" And yes, that’s exactly what many people try.
To tolerate motor inrush currents, a circuit breaker typically needs to be sized at 200% to 250% of the motor’s running current. A motor that normally draws 10 amps would need a 20-25 amp breaker.
But here’s the catch—now you’ve created a dangerous protection gap. The breaker won’t trip until current reaches 20-25 amps, but your motor is only rated for 10 amps continuous operation. If the motor experiences a moderate overload—Let’s say it’s drawing 12-15 amps because of a mechanical problem or voltage issue—the breaker just sits there doing nothing. The motor windings overheat, insulation breaks down, and eventually the motor fails. From the breaker’s perspective, nothing “wrong enough” ever happens to justify a trip.
Mechanical Wear and Maintenance Issues
Mechanical wear is a major issue when using circuit breakers for frequent motor switching.
Circuit breakers are designed for occasional operation, not the repeated starting and stopping of motors. Using them this way can lead to rapid wear, higher maintenance costs, and early equipment failure.
Designed for Different Jobs
Here’s a fundamental truth about circuit breakers: they’re built for occasional operation. In a typical installation, a circuit breaker might trip a few times per year when faults occur. And that’s it. The rest of the time, it simply sits closed, conducting current but not moving.
[Vacuum circuit breakers](https://cdn2.hubspot.net/hubfs/283740/Joslyn Clark/White Papers/white-paper-vacuum-contactors-vs-vacuum-circuit-breakers.pdf) used in motor applications have a mechanical endurance rating of roughly 10,000 operations. That sounds like a lot until you compare it to vacuum contactors—the proper motor control device—which can perform up to 1,000,000 operations at continuous current ratings.
To put that in perspective. If you’re starting and stopping a motor just five times per day, five days per week:
- Circuit breaker: 10,000\;operations ÷ 25\;operations/week = 400\;weeks(\sim7.7 years)
- Contactor: 1,000,000\;operations ÷ 25\;operations/week = 40,000\;weeks (\sim769 years)
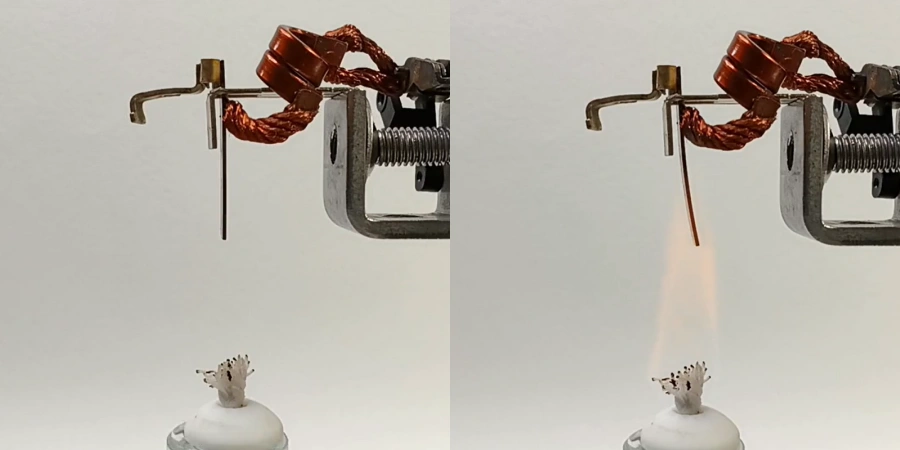
The Arcing Problem
Every time electrical contacts open under load, an arc forms between them. It’s brief—measured in milliseconds—but it’s extremely hot. This arc causes microscopic pitting and erosion on the contact surfaces. Over time, the smooth surfaces become rough and pitted, increasing contact resistance.
Higher resistance means more heat generation. More heat means faster degradation. It’s a vicious cycle that accelerates wear with each operation.
In contrast, contactors are specifically designed for this frequent switching duty. Their contacts are made from materials and structure optimized to withstand millions of arcing operations. The contact pressure, arc chutes, and interrupting mechanisms are all engineered for the specific demands of motor control.
Maintenance Reality Check
Eaton’s studies show that breaker-based motor starters may require maintenance within a year in heavy-duty applications, while contactor-based solutions can last decades with little to no maintenance.
This clearly explains why it’s important to use equipment designed for frequent motor switching. Proper motor control devices handle wear better and keep motors running reliably for a long time.
Phase Loss and Current Imbalance Risks
In three-phase motor systems, losing a single phase is one of the most common situations a motor can encounter. When one phase is lost, the motor may keep running on the remaining two phases, drawing excessive current and overheating rapidly. Standard circuit breakers are completely blind to this problem and cannot prevent the motor from being damaged.
What Happens During Phase Loss?
When a three-phase motor loses one of its phases, it doesn’t just stop—it tries to keep running. The motor attempts to operate on the remaining two phases, but the physics become brutal. The motor draws unequal currents on the remaining phases as it struggles to maintain operation. These currents can spike to 1.5 to 2 times normal operating current on the healthy phases.
The motor essentially becomes a single-phase motor trying to do three-phase work. It overheats rapidly, often within minutes. The temperature inside the windings can climb from normal operating range (around 80-100°C) to failure temperatures (over 200°C) in less than five minutes of operation.
Why Circuit Breakers Miss It?
Here’s the problem: even if a single-pole breaker trips on the lost phase, a standard three-phase breaker has no way of disconnecting all three phases when phase loss occurs. The motor continues running on two phases while the breaker on the dead phase sits there in the tripped position, doing nothing to save the motor.
The current drawn on the remaining phases might not even be high enough to trip their breakers—remember what we said in the previous chapters, we sized those breakers at 200-250% of motor current to avoid nuisance tripping. The motor is drawing 150% on two phases, which is below the breaker’s trip threshold, but it’s absolutely cooking the motor windings.
Current Imbalance: The Silent Killer
Even without complete phase loss, voltage imbalance between phases can cause problems. A voltage imbalance of just 3.5% can cause current imbalance of 25% or more. This creates uneven heating in the motor windings. One phase runs hot while the others run cooler, but the overall current might still appear "normal" to a circuit breaker.
Specialized Motor Protection Solutions
It’s worthing mentioning that the electrical industry didn’t just ignore these problems—they have developed specialized solutions. The key is understanding which solution fits your specific application.
Motor protection isn’t one-size-fits-all, and knowing your options helps you make better decisions for your facility:
-
Motor Protection Circuit Breakers (MPCBs): These combine multiple protections in one device. They include adjustable thermal elements that match the motor’s full-load current and can tolerate high starting currents without nuisance trips. Many also detect phase loss or current imbalance, instantly disconnecting the motor if something goes wrong.
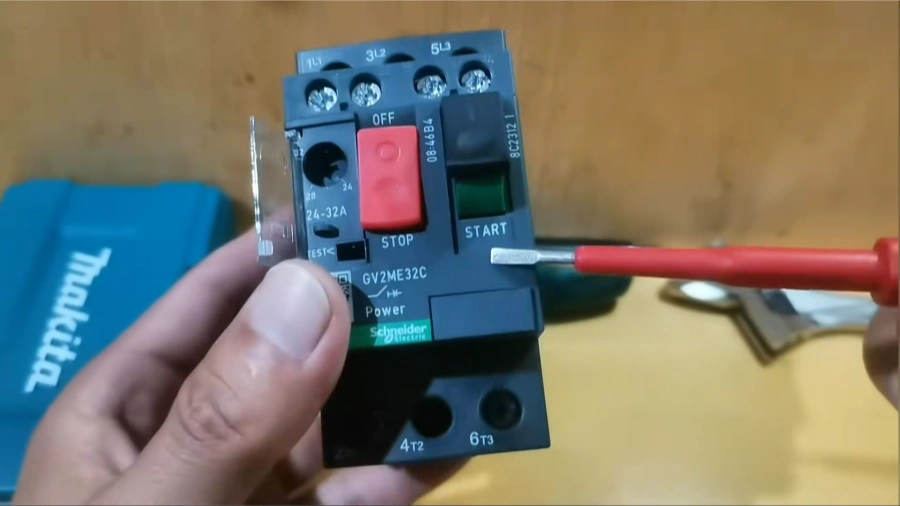
Motor Protection Circuit Breaker -
Motor Starters: The industry standard for frequent starting and stopping. They combine a magnetic contactor for switching and an overload relay for thermal protection. This separation allows each component to do its job efficiently and reliably. Motor starters integrate easily with control systems and handle repeated operations that would quickly wear out a standard breaker.
-
Soft Starters: These gradually ramp up voltage to reduce mechanical stress and lower inrush current, protecting equipment like conveyors and pumps. They’re efficient and preserve power quality while extending mechanical life.
-
Variable Frequency Drives (VFDs): The most advanced option, VFDs control both voltage and frequency, allowing precise speed control and very gentle starts. They’re ideal when energy savings or variable-speed operation is required but are more expensive and complex than other solutions.
Each solution has its place. MPCBs and motor starters excel at protecting motors in typical on-off applications, soft starters are great for controlling mechanical stress and power quality, and VFDs offer maximum control and efficiency for variable-speed needs. We won’t cover too much details here as that’s not the topic today.
Final Thoughts
Motors and breakers each have their own “personality,” and ignoring that can be costly. The real insight is learning to work with the tools and machines, not just against them, turning potential problems into opportunities for smarter design.
If you are looking for industrial-grade protection that meets international standards, choosing the right manufacturer is the first step to ensuring safety.